 |
(Eq. 1) |
Since the majority of sources detected by WISE are expected to be spatially unresolved, the optimal approach for source characterization involves profile-fitting photometry (WPRO). Profile-fitting is our primary method of flux estimation -- it gives the best results for the majority (i.e., the fainter) sources, handles PSF variations and masked pixels in an optimal fashion, and extends the dynamic range for bright sources well into the saturated regime.
Just as with the detection step, profile-fitting is carried out using the data from all bands simultaneously. The advantages of simultaneous multiband extraction are:
2. No separate bandmerging step is required, thus avoiding the ambiguities which can occur when trying to associate sources in different bands in the presence of confusion.
3. The higher resolution data at the shorter wavelengths can guide the extraction at the longer wavelengths where the resolution is poorer.
The multiband estimation process represents a departure from the traditional procedure, employed in such software packages as DAOPHOT (Stetson 1987) and SExtractor (Bertin & Arnouts 1996), in which detection and characterization are carried out one band at a time. Another motivation for developing new source extraction algorithms is that currently available packages operate on a single regularly-sampled image rather than a set of dithered images. The procedures employed in MDET and WPHOT are optimized for the latter case.
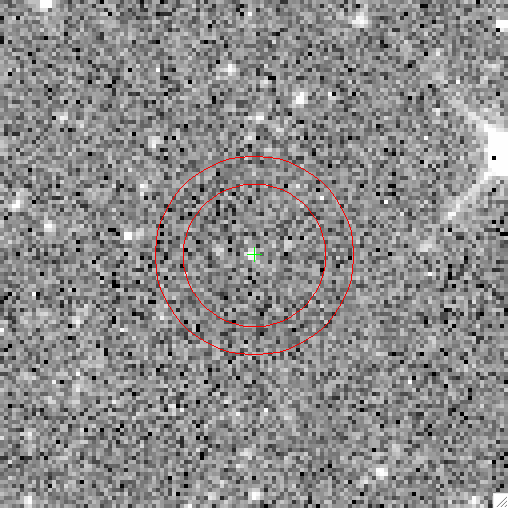
The local background is determined from the pixel value distribution within a circular annulus centered on the source MDET position. The source background, b_λ and σ^2_bann, representing the local "sky" background level and its uncertainty, are estimated from the trimmed average of the pixel value distribution, where the trimming is driven by the 50% (median) and 16% (lower 1-σ) histogram shape and thus robust to contamining sources in the annulus (whose pixel values reside on the positive side of histogram median); see figure for illustration.
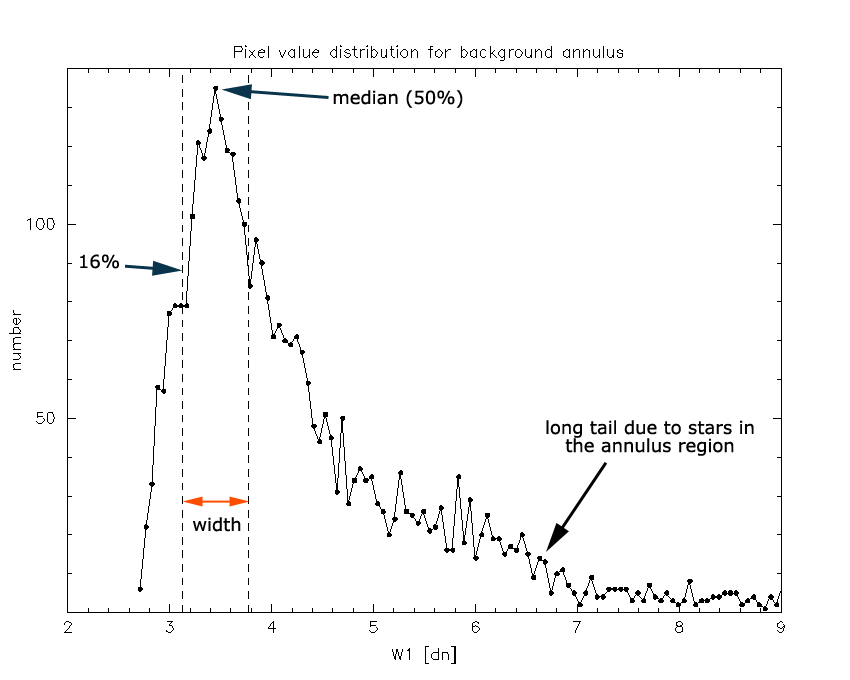
The formal background error, or sigma in the mean, is derived from the the error propagation that follows the instrument characteristics and the noise model that is tracked by AWAIC and passed to on to WPHOT. With this noise model, the formal uncertainty in the background sky level is
|
(Eq. 1) |
where N_b is the number of pixels in the annulus and σ_i is the measurement uncertainty for detector/frame pixel i, and F_b is the correlation factor that is appropriate to the images being measured (for WISE frames, the factor is unity, and for co-adds it ranges between 30 and 225, W1 to W4, respectively).
 |
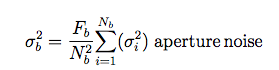
| Figure 1 - Aperture photometry parameters: standard aperture (red) and local background annulus (green). |
The formal background uncertainty is not sensitive to confusion noise that may be present in the aperture or annulus. It therefore requires a correction to account for any stellar crowding or confusion noise. A reasonable proxy to the total noise comes from the annulus background uncertainty, σ^2_bann. We therefore make the assumption that the confusion noise is the difference between the total noise in the annulus and the formal (Poisson) noise in the aperture:
 |
(Eq. 2) |
For most of the sky, the confusion noise term is zero or negligible in value, but for the Galactic Plane where stellar crowding is an important concern, the confusion noise term may be appreciable.
 |
 |
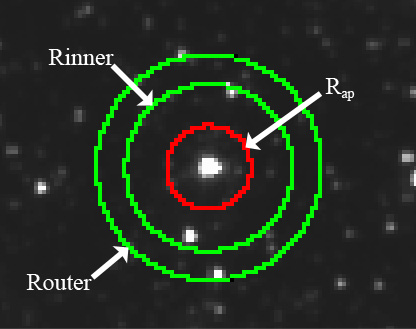
| Figure 2 - Example of a background annulus and its pixel value distribution (right panel). | Figure 3 - The local background is estimated from trimmed average of the pixel value distribution in the local background annulus. Using iterative convergence, the trimming is based on the left side of the histogram median, where the width is gauged from the 16% quartile to the 50% (median). |
Choosing the optimal size for the annulus is an important consideration toward accurate photometry. The annulus must be large enough to avoid the influence of the point spread function and to minimize the Poisson component of the sky pixels (see equation below). On the other, it must also be small enough to represent the "local" sky value (that is to say, the fluctuations that are present in the aperture should be of similar amplitude in the annulus). Moreover, in order to accommodate the possibility of the source being fuzzy galaxy, the annulus should extend beyond the size expected for most galaxies in the sky.
Consider what was done with 2MASS background estimation. For standard 2MASS point source photometry, the annulus that was used: R_inner = 14 arcsec, R_outer = 20 arcsec, with 2 arcsec pixels that translates to 160 pixels in the annulus. The 2MASS beam is about 2.5 arcsec, so R_inner is ~6x the FWHM. For the combined calibration fields, 2MASS used a larger annulus, 24-30 arcsec in size, or roughly ~10x the FWHM. The standard calibration aperture for IRAC is 12 arcsec, and the annulus is 14.4 - 20 arcsec, which compared to the 2 arcsec beam is ~7-10x the FWHM.
For WISE, the FWHM=6 arcsec for the short channels, and so using 2MASS/IRAC as a guide, the inner radius would be ~40 - 50 arcsec (80 - 100 arcsec for WISE-4); with 2.75 arcsec pixels, that translates to R_inner ~ 15 - 18 pixels. For the width, using a similar area as the 2MASS/IRAC annulus, then R_outer ~ 19 pixels. Since that is a relatively thin aperture, subject to pixelization effects, it would be better to extend it to a width of 4 - 5 pixels, or R_outer = 20 - 22. Consequently, the adopted annulus for WISE point sources is: 50 - 70 arcsec (for all four bands), corresponding to 18-25 pixel radius in W1, W2, W3, and 9 to 13 pixels for W4. This setting is constrained by the W4 beam.
The purpose of this step is to make a maximum likelihood estimate of the source position and the set of fluxes at the four wavelengths for each source candidate identified by the detection module MDET. The candidate source and its neighbors (i.e., adjacent candidates whose PSF responses overlap significantly with the primary candidate) are grouped into blends, and their parameters estimated simultaneously; this process is referred to as passive deblending, and is incorporated explicitly into the photometric measurement model. The critical distance for blend grouping is driven by the size of the PSF at the longest wavelength; neighbors separated from the source in question by less than twice the nominal FWHM at W4 (i.e., 24 arcsec) are included in the initial blend group.
For a blend consisting of NB components, the measurement model used in profile fitting is:
 |
(Eq. 3) |
where ρλi is the observed value of the ith pixel at 2-d sky location rλi in the waveband denoted by subscript λ, sn is a 2-d vector representing the location of the nth blend component, fλn is the flux in the λth waveband, Hλ(r) is the PSF, bλ is the local background, estimated in an annulus surrounding the candidate position, and νλi is the noise, assumed to be a spatially and spectrally uncorrelated zero-mean Gaussian random process with variance σλi2.
The latter quantity includes the various noise components in the error model and may be expressed as:
 |
(Eq. 4) |
The set of unknowns in the estimation process can be represented by an np-dimensional parameter vector, z, defined as:
 |
(Eq. 5) |
The solution procedure is to maximize the conditional probability P(ρ|z,NB) with respect to z, where:
 |
(Eq. 6) |
The quality of the fit is then evaluated using the reduced chi squared, given by:
 |
(Eq. 7) |
At this point, the blend group is examined to check for redundant components, i.e., those components which can be removed without an increase in the reduced chi squared. Thus the final value of NB can be less than the initial value defined above.
The overall profile-fitting photometry procedure is illustrated by the flow chart in Figure 4. Please note, however, that the portion within within the blue dashed rectangular box ("Active deblending") is not used in scan/frame processing.
 |
| Figure 4 - WPRO Flow Chart |
When a satisfactory solution has been obtained, the uncertainties in the estimated parameters (position and fluxes) are obtained using:
 |
(Eq. 8)
|
in which E is the expectation operator and T denotes transpose.
The way in which the above estimation procedure is implemented is that we start with the brightest source in the candidate list and estimate its parameters as above. We then proceed as follows:
1. Write out the source position and multiband fluxes.
2. Discard the results for any passively-deblended components, i.e., those components corresponding to neighboring candidates in the MDET detection list---these candidates will be processed later.
3. Subtract the estimated contributions of the primary source from the focal-plane images.
We then repeat the procedure for the next brightest candidate, and so on until the MDET candidate list is exhausted.
Each PSF in the library represents an average over a focal-plane segment of width WP, over which we approximate the PSF as locally isoplanatic. The driver for WP is the Functional Requirement of at least 7% flux accuracy for an unsaturated source with SNR > 100. Our 9x9 subdivision of the focal plane exceeds this requirement by typically better than a factor of 4. We now discuss in detail the procedure used for PSF estimation in each focal-plane segment.
The measurement model for the PSF is then:
 |
(Eq. 10) |
where sn is the location of the nth star in the segment. The origin of the coordinate system for the PSF image is defined to be at the star location.
The noise, νnj, is assumed to be an uncorrelated Gaussian random process for which
 |
(Eq. 11) |
From the set of star images, we can make a maximum likelihood estimate of the PSF using:
 |
(Eq. 12) |
where f^n and s^n represent the estimated flux and position, respectively, of the nth star. For bright stars, an accurate flux estimate can be obtained via aperture photometry.
The source position sn is estimated by adjusting the positional offset of the star image for maximum correlation with respect to a nominal starting PSF, H0(r'), for which we used a theoretical form based on optical simulations. The estimation is accomplished by numerical minimization, with respect to sn, of:
 |
(Eq. 13) |
The PSF uncertainty, δH(r), which enters into the photometry noise model, can be estimated by examining the behavior of the data residuals after subtracting a point source model. The ith data residual from the nth star is given by:
 |
(Eq. 14) |
We model Δni as a zero-mean Gaussian random process with variance
 |
(Eq. 15) |
where δH(r) represents the PSF uncertainty at offset r from the PSF origin; g and NR represent the gain and read noise, respectively.
Suppose that the position (ri - sn) falls within the jth pixel on the grid used to represent the PSF, i.e.,
 |
(Eq. 16) |
 |
(Eq. 17) |
where (x'j, y'j) represent the components of r'j, (ξn, ηn) represent the components of sn, and δx, δy represent the sampling intervals of the PSF grid in the x and y directions, respectively.
Then:
 |
(Eq. 18)
|
Thus the probability density of the set of local data residuals, Δ, conditioned on δHj, is given by:
 |
(Eq. 20) |
where the summations are over all n, i which satisfy (16) and (17) for a given j.
This expression is maximized when:
 |
(Eq. 21)
(Eq. 22) |
Since δHj is present on both sides of (21), iterative solution is required. Convergence is rapid, however, and a single iteration suffices.
The PSFs and their corresponding uncertainty images, as used for the Preliminary Release, were generated one band at a time using the procedure described above. Candidate frames were selected from all scans between 01601a (by which time improved astrometry had been implemented) and 01751a. Initial frame selection was made by searching source detection tables for bright unsaturated stars, requiring SNR of at least 30 in the case of W4. This yielded 1028 candidate framesets. The W1 images were then visually examined to remove those images with obvious tracking problems (elongated images), high cosmic ray fluxes, highly crowded fields in the Galactic plane, structured backgrounds (e.g. nebulae), very bright stars saturating large areas of the array, and scattered moonlight. This selection process left 888 candidate framesets. The practical limit on the number frames that WPSFGEN can process at once is ~500, so another 300 framesets were removed by randomly rejecting framesets which had only one band four detection with W4SNR > 30. The final list of 484 frames provided 68749 unique sources with SNR > 100.
For bands W1-W3, PSFs were generated in 9x9 grids over the focal plane.
Because of the relative scacity of bright stars in W4, a 5x5 grid was
generated, and interpolated between adjacent PSFs to form a 9x9 grid.
The following is aset of pseudocolor representations of the PSFs using a
linear intensity scale, clipped at 60% of peak; the width of the field of
view is 43.5 arcsec for W1-W3 and 87 arcsec for W4:
 |
 |
 |
 |
| Figure 5 - WISE PSFs | |||
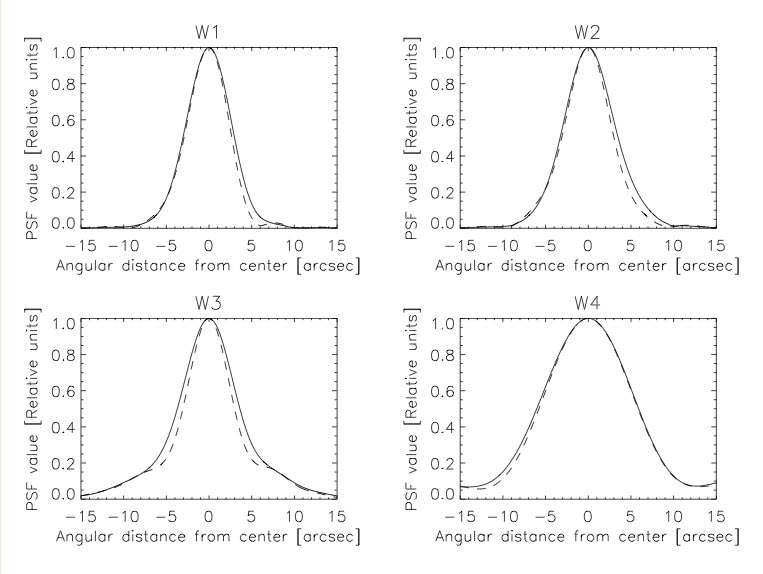
Profiles through the central PSF in the 9x9 array in each band are shown in Figure 6. The major axis has been defined as that for which the FWHM is maximized, and the minor axis is perpendicular to that.
|
| Figure 6 - PSF profiles through major axes (solid lines) and minor axes (dashed lines). |
The major and minor axes and position angles of major axes of the central PSFs are then as follows:
| Band | Major Axis FWHM [arcsec] |
Minor Axis FWHM [arcsec] |
Major Axis PA [deg] |
|---|---|---|---|
| W1 | 6.08 | 5.60 | 3 |
| W2 | 6.84 | 6.12 | 15 |
| W3 | 7.36 | 6.08 | 6 |
| W4 | 11.99 | 11.65 | 0 |
estimates can be found in IV.6.d.i.
w?sat: The number of saturated pixels located within the photometric "fitting" region in the vicinity of the source, expressed as a fraction of the total number of pixels within that region. The saturated pixels themselves were excluded from the solution, as explained above.
w?frl: The fractional number of pixels within the fitting region which were flagged as begin contaminated by latents. These pixels were also excluded from the solution.
It should be understood that the profile fitting system (WPRO) represents the most accurate flux estimation for point sources under nearly all circumstances for single-frame measurements. Aperture photometry is susceptible to bad pixels, artifacts and radiation events, rendering integrated counts unreliable. For the multi-frame (coadded mosaics) processing, however, aperture photometry is reliable and the preferable method for measuring the integrated flux from resolved sources. More details on multi-frame Aperture photometry is given in IV.5.c.
The primary functions of WAPP is to carry out circular aperture photometry and local background estimation. It performs the initial (preliminary) flux measurements for source characterization by WPRO, and applies a full suite of circular apertures on the single frames. The aperture MASK is scanned for bad, saturated or fatal-flagged pixels, and the aperture flux is flagged accordingly. If nearby stars are detected within the aperture, the flag is set to indicate ``contamination''.
| bands | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | units |
| W1, W2, W3 | 5.50 | 8.25 | 11.00 | 13.75 | 16.50 | 19.25 | 22.00 | 24.75 | arcsec |
| W4 | 11.00 | 16.50 | 22.00 | 27.50 | 33.00 | 38.50 | 44.00 | 49.50 | arcsec |
Multiple aperture photometry is the primary function of the WAPP system. A set of nested circular apertures centered on the source (as determined by WPRO) provides the "curve of growth" for a source. The aperture sizes range from the smallest APMIN (5.5 arcsec) to the largest APMAX (24.75 arcsec) which is constrained by the background annulus. The photometry is carried out using code, developed by 2MASS, that is adapted for WISE images. It includes fractional pixel computations and the ability to use non-circular (elliptical) apertures that are deployed for measurements of 2MASS XSC galaxies.
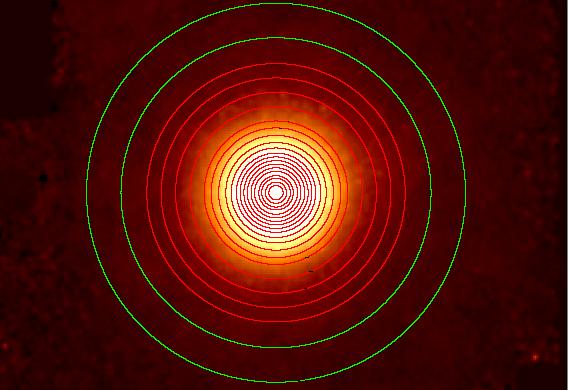 |
| Figure 7 - Set of nested circular apertures (red) and background annulus (green). |
 |
(Eq. 23) (Eq. 24) (Eq. 25) (Eq. 25) (Eq. 26) (Eq. 27) |
where G is the gain (electrons per DN), N_ap is the number of pixels in the circular aperture of radius R_ap, N_b is the number of pixels in the background annulus, b_λ and σ_bann_λ are the sky background level and uncertainty in the annulus pixel distribution, respectively, σ_ann_λ is the uncertainty due to the finite annulus, and σ_b_λ is the measurement uncertainty detector/frame pixel based on the error model (see Eq. 1) and the estimated confusion noise, F_a and F_b are the pixel correlation factors, where they are roughly equal to each other.
Aperture photometry flag values:
value Condition
----- ------------------------------------------------------
0 nominal -- no contamination
1 source confusion -- another source falls within the measurement aperture
2 bad or fatal pixels: presence of bad pixels in the measurement aperture (bit 2 or 18 set)
4 non-zero bit flag tripped (other than 2 or 18)
8 corruption -- all pixels are flagged as unusable, or the aperture flux is negative;
in the former case, the aperture magnitude is NULL; in the latter case, the aperture magnitude is a 95% confidence upper limit
16 saturation -- here are one or more saturated pixels in the measurement aperture
32 upper limit -- the magnitude is a 95% confidence upper limit
combinations:
3 source confusion + bad pixels
5 source confusion + non-zero bit flag
6 bad pixels + non-zero bit flag
7 source confusion + bad pixels + non-zero bit flag
9 source confusion + corruption
10 bad pixels + corruption
11 source confusion + bad pixels + corruption
12 non-zero bit flag + corruption
13 source confusion + non-zero bit flag + corruption
14 bad pixels + non-zero bit flag + corruption
15 source confusion + bad pixels + non-zero bit flag + corruption
17 source confusion + saturation
18 bad pixels + saturation
19 source confusion + bad pixels + saturation
20 non-zero bit flag + saturation
21 source confusion + non-zero bit flag + saturation
22 bad pixels + non-zero bit flag + saturation
23 source confusion + bad pixels + non-zero bit flag + saturation
24 corruption + saturation
25 source confusion + corruption + saturation
26 bad pixels + corruption + saturation
27 source confusion + bad pixels + corruption + saturation
28 non-zero bit flag + corruption + saturation
29 source confusion + non-zero bit flag + corruption + saturation
30 bad pixels + non-zero bit flag + corruption + saturation
31 source confusion + bad pixels + non-zero bit flag + corruption + saturation
When the WPRO or WAPP flux measurement has a signal-to-noise ratio less than 2, the respective WPRO or WAPP calibrated magnitude in the Working Database is replaced with the 2-σ brightness upper limit in magnitude units. In these cases, the magnitude uncertainty values are set to NULL.
The magnitude upper limit is computed
by replacing the integrated flux measurement with the
flux measurement plus two times the measurement uncertainty, as
shown below. If the integrated flux measurement is negative, then
the flux is replaced with two times the flux uncertainty.
 |
(Eq. 28) (Eq. 29) (Eq. 30) (Eq. 31) |
where mzeroλ is the instrumental zero point magnitude (IV.3.g.iv), m_λ is the reported upper limit in mag units, and its uncertainty δm_λ is set to NULL.
Last update: 2011 August 4