
| Coverage Simulations for Band 2 Candidate Array (fpa143) | |
We present simulated depth-of-coverage maps using bad-pixel masks constructed from a WISE band-2 (4.7μm) candidate array. This is referred to as detector "FPA143" in the test suite.
The simulations below are a continuation of those for a previous band-2 candidate (FPA141): Coverage Simulations for Band 2 Candidate Array (fpa 141). Below we adopt the same assumptions, methodology and software as presented therein.
The main input is a bad pixel mask image provided by the WISE Science Project Office. This was recieved as a 1024x1024 FITS image with bad pixels denoted with a value "1", and good pixels denoted with value "0".
For FPA143, bad pixels were identified using the same criteria as outlined in Coverage Simulations for Band 2 Candidate Array (fpa 141). For your informaion, ~5.2% of pixels in FPA143 (in the active region) are declared as bad.
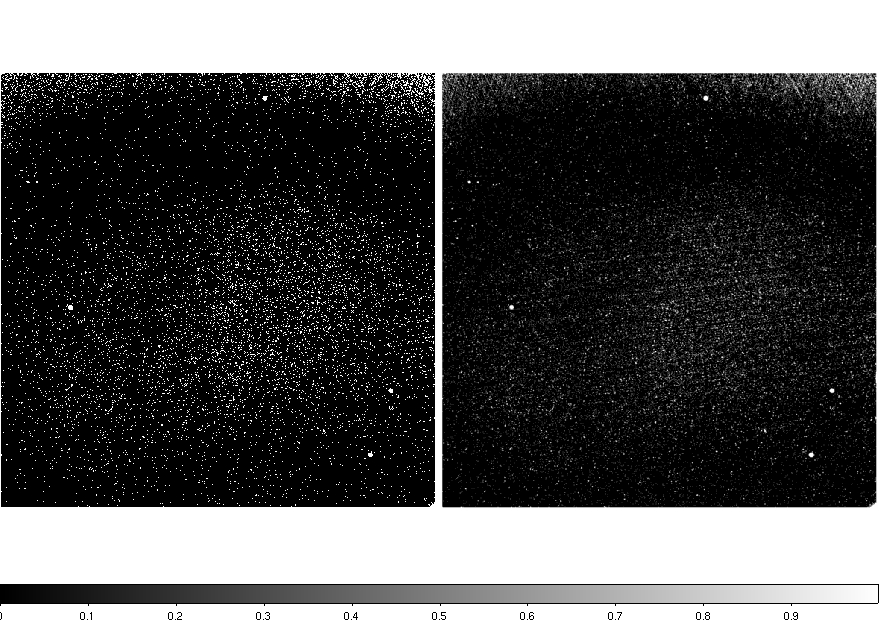 |
| Figure 1 - Left: bad-pixel mask from FPA143 provided by project office. Right: same mask after smoothing with an interpolation kernel (see below for details). Click on image to enlarge. |
These masks can be downloaded in FITS format here:
We performed two simulations, each consisting of 100 (15-orbit) coverage realizations, corresponding to two bad-pixel masks: one using the default mask, and another using the same mask but smoothed with an interpolation kernel.
We present below coverage fractions, maps and histograms computed from the 100 realizations. These statistics represent the fraction of pixels (or area) within a simulated 2048x1024 central region with that depth-of-coverage. The means are computed over all realizations. The coverage maps represent those whose coverage fractions fall closest to the mean fractions.
cov. mean fraction (0 degrees) 3 0.00000999 4 0.00066078 5 0.00764946 6 0.05194377 7 0.18636921 8 0.29444338 9 0.25664891 10 0.13692860 11 0.04887179 12 0.01289172 13 0.00277685 14 0.00058730 15 0.00017820 16 0.00003998
cov. mean fraction (90 degrees) 3 0.00000599 4 0.00075568 5 0.00851748 6 0.05494734 7 0.18695492 8 0.29097404 9 0.25009989 10 0.13743634 11 0.05160872 12 0.01467195 13 0.00306873 14 0.00072192 15 0.00020361 16 0.00003331
 |
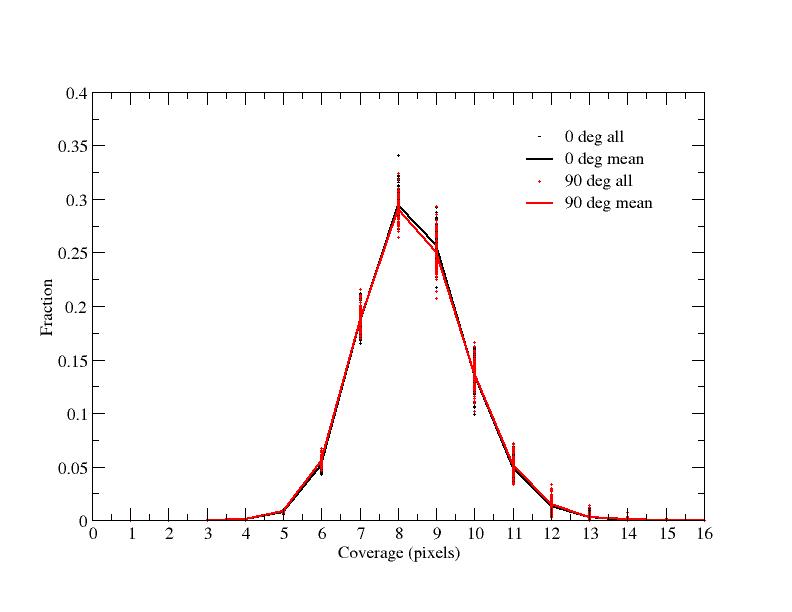 |
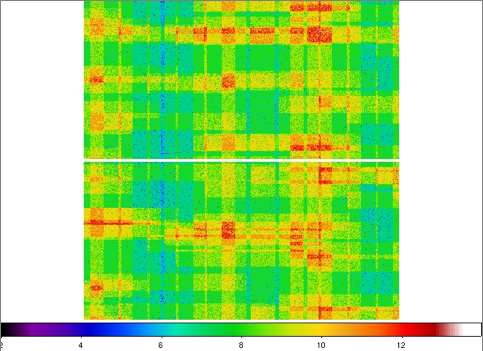
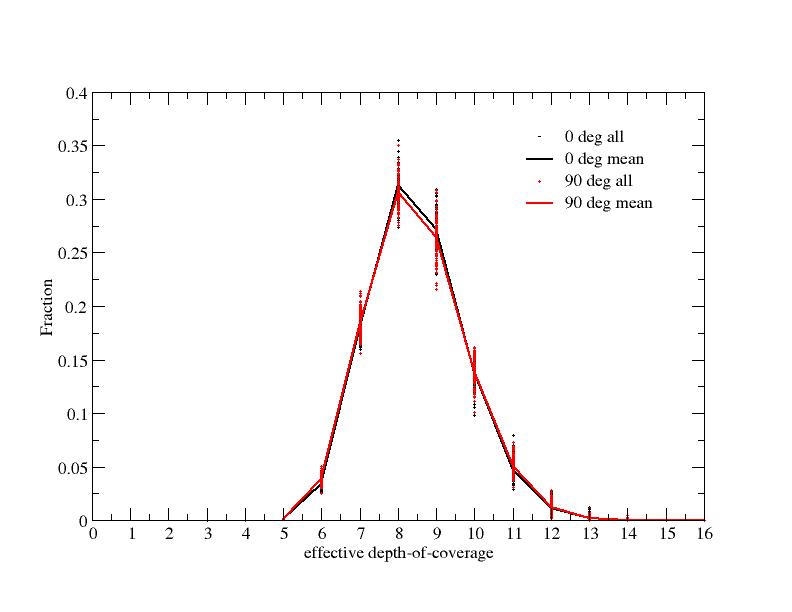
| Figure 2 - Coverage maps for Test 1 (default mask): top = 0 degrees; bottom = 90 degrees. | Figure 3 - Coverage distributions for Test 1 (default mask). |
| Left: false color JPEG images of coverage maps for the default mask. The color bar at the bottom corresponds to the approximate coverage depth. Right: corresponding coverage distribution with fractions normalized to unity. Dots represent the 100 individual realizations. The lines go through the mean fractions from all realizations. Click on thumbnails to see full-size JPEG maps. | |
Summary
cov. mean fraction (0 degrees) 5 0.00110773 6 0.03402189 7 0.18148174 8 0.31263049 9 0.27185920 10 0.13863895 11 0.04686083 12 0.01100237 13 0.00189554 14 0.00039498 15 0.00010622
cov. mean fraction (90 degrees) 5 0.00126862 6 0.03833573 7 0.18414788 8 0.30641195 9 0.26448227 10 0.13944702 11 0.05042518 12 0.01257930 13 0.00228832 14 0.00048372 15 0.00010496 16 0.00002499
 |
 |
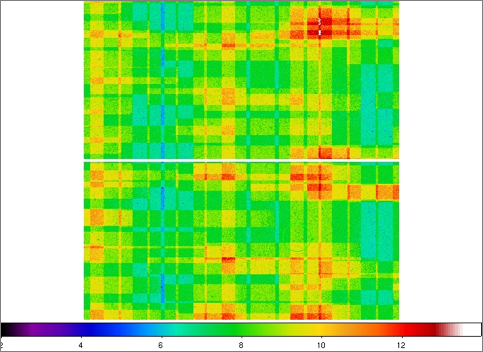
| Figure 4 - Coverage maps for Test 2: top = 0 degrees; bottom = 90 degrees. | Figure 5 - Coverage distributions for Test 2. |
| Left: false color JPEG images of coverage maps for Test 2 (including smoothing from an interpolation kernel). The color bar at the bottom corresponds to the approximate coverage depth. Right: corresponding coverage distribution with fractions normalized to unity. Dots represent the 100 individual realizations. The lines go through the mean fractions from all realizations. Click on thumbnails to see full-size JPEG maps. | |
Summary